Estudio biomecánico en fijación espinal canina
Resumen breve
Los cirujanos en medicina veterinaria se ven con la urgencia de contar con medios adecuados y actuales para resolver patologías espinales que requieran tratamiento quirúrgico (p. ej., fractura, fractura/luxación o luxación causado por atropellamiento de automotores, disparos con arma de fuego, peleas entre animales, caídas de altura, listesis vertebral, etc.).Índice de contenidos
Introducción
Los cirujanos en medicina veterinaria se ven con la urgencia de contar con medios adecuados y actuales para resolver patologías espinales que requieran tratamiento quirúrgico (p. ej., fractura, fractura/luxación o luxación causado por atropellamiento de automotores, disparos con arma de fuego, peleas entre animales, caídas de altura, listesis vertebral, etc.).
Las primeras comunicaciones de ensayos quirúrgicos para la reparación de fracturas espinales, fueron realizadas por investigadores ingleses1-4. Estos cirujanos, describieron técnicas en las que usaron placas de acero inoxidable tomadas a las apófisis espinosas dorsales con tornillos pasantes. Desde entonces han sido comunicadas diversas técnicas. Las más utilizadas a lo largo del tiempo fueron:
- Placas plásticas tomadas a las apófisis espinosas con tornillos pasantes4, 5,6.
- Alambres y clavos de acero inoxidable en el compartimiento dorsal7.
- Clavos cruzados en los cuerpos vertebrales 8.
- Placas con tornillos en los cuerpos vertebrales9.
- Tornillos en las apófisis articulares10.
- Tornillos o clavos de Steimann en el cuerpo vertebral tomados con metilmetacrilato1, 2, 3, 4, 7, 8, 9, 10, 11, 12, 13, 14.
Si bien a través del tiempo las técnicas implementadas lograron mejorar la calidad de vida de los pacientes con trauma espinal, aún no se han logrado resultados que permitan una recuperación óptima y predecible de los mismos. El desarrollo de un método que mejore el pronóstico quirúrgico de estos pacientes, y brinde seguridad al cirujano, actuará como estímulo para que un mayor número de perros sea sometido a este tipo de cirugía, facilitando la recuperación de la fisiología del movimiento, una calidad de vida aceptable y evitando de esta forma la eutanasia.
Fue Roy-Camille15 quien desarrolló la primera práctica con este sistema con tornillos pediculares en 197015 para resolver patologías que sufrían pacientes con escoliosis, xifosis o traumas espinales en diferentes regiones.
El sistema de fijación espinal a través de tornillos transpediculares es el método de elección en la actualidad en humanos para un tratamiento quirúrgico espinal confiable y aceptable.
El tornillo transpedicular posee un cuerpo con rosca positiva auto-roscante, auto-centrante y una cabeza cuya característica es que en su interior permite colocar la barra que facilita la unión con un tornillo transpedicular vecino, esta será sujetada mediante una tuerca de bloqueo.
El sistema de fijación (SCAM) consta de tornillos transpediculares colocados en cuerpo vertebral con un ángulo de 35 grados con respecto al eje longitudinal espinal, siendo su lugar de ingreso la base de la apófisis transversa.
Se decide la base de la apófisis transversa como punto de ingreso, debido a que el pedículo de la vértebra en canino es muy delgado y sufriría daño al momento de la colocación, además de no brindar seguridad en el amarre del sistema.
El propósito de este estudio es aportar un nuevo sistema de fijación espinal para resolver patologías como luxaciones, fracturas o ambas, producidas por trauma espinal exógeno, además de deformidades congénitas o listésis en diferentes regiones anatómicas.
Metodología
Se obtuvieron columnas vertebrales caninas testeadas por radiografías para descartar patologías preexistentes. Se utiliza el sector de la columna vertebral comprendido entre la vértebra torácica 13 y la vértebra lumbar 6, debido a que es unos de los segmentos vertebrales que más se afecta tanto en traumas exógenos como endógenos.
Para realizar el estudio se procede a la realización del modelo experimental, el cual se obtiene a partir del eviscerado del cadáver y desarticulado de las costillas que se corresponden con la vértebra T13. Posteriormente se procede a retirar la musculatura epiaxial y sublumbar, desde T13 hasta L6, dejando solamente las estructuras osteoarticulares y ligamentos.
Finalmente se procede a retirar dicho segmento vertebral del cadáver obteniéndose de esta forma el modelo experimental.
Luego de obtener el modelo vertebral se envuelve con una tela de algodón embebiéndola con solución salina, posteriormente se sella dentro de una doble bolsa de polietileno y es almacenada en cámara de –20ºC16.
Para realizar los diferentes tipos de mediciones los modelos vertebrales se retiran de la cámara de frío 24 h antes16, 17.
Para evaluar la fuerza y la rigidez del modelo experimental se colocan transversalmente clavos de Steinmann de 2 mm de diámetro en el cuerpo de las vértebras L2-L3 y L4-L5 centrándolo en la vértebra L3. Estos clavos se fijan a una máquina de ensayos universal de marca Instron Modelo TT-CM (Instron testing machine, Instron Ltd., High Wycombe, England)16 para aplicar flexión y extensión en 4 puntos sobre el cuerpo vertebral: Se mide la fuerza versus el grado de deformidad o deformación con una carga de aproximadamente 112.5 N en extensión sin generar la rotura del conjunto vertebral y luego se cambia el sentido de la carga y se aplica una carga de flexión hasta llegar al punto de ruptura o colapso con una velocidad de deformación que puede variarse hasta un máximo 50 mm/min. Esta secuencia de carga se realiza con una velocidad de deformación constante durante todo el ensayo16,18. La fuerza aplicada por la máquina de ensayos y la correspondiente deformación será registrada en un gráfico del tipo x-y.
Este trabajo se centra en el desarrollo de tres ensayos sobre un tipo de implantes y se los compara con las mediciones experimentales de un modelo espinal intacto y otro desestabilizado: este corresponde a un modelo experimental desestabilizado con la técnica de laminectomía Funkquist A. El tercer modelo espinal corresponde a un modelo experimental desestabilizado e instrumentado con el sistema de fijación espinal (SCAM).
Los resultados del ensayo se expresan a través del momento flector (MF = brazo de palanca, r por fuerza aplicada, f ).
Donde el momento flector estará expresado en Newton ·metro (Nm), el brazo de palanca en metros (m) y la fuerza en Newton (N)16,19.
La curva del momento flector versus el ángulo de deformación se analiza para determinar la rigidez angular en Newton metro/grados (Nm/º), también se buscarán determinar el momento flector cuando la deformación angular es de 10º (Nm10º) y el momento flector de colapso y la deformación angular máxima en flexión del conjunto vertebral. En el punto de rotura o de momento flector máximo o final (con la columna en flexión), se realizarán inspecciones para determinar cuál fue el mecanismo de ruptura del conjunto, es decir, si se produjo una fractura espinal, daño de ligamentos, o falla del dispositivo utilizado19, 20.
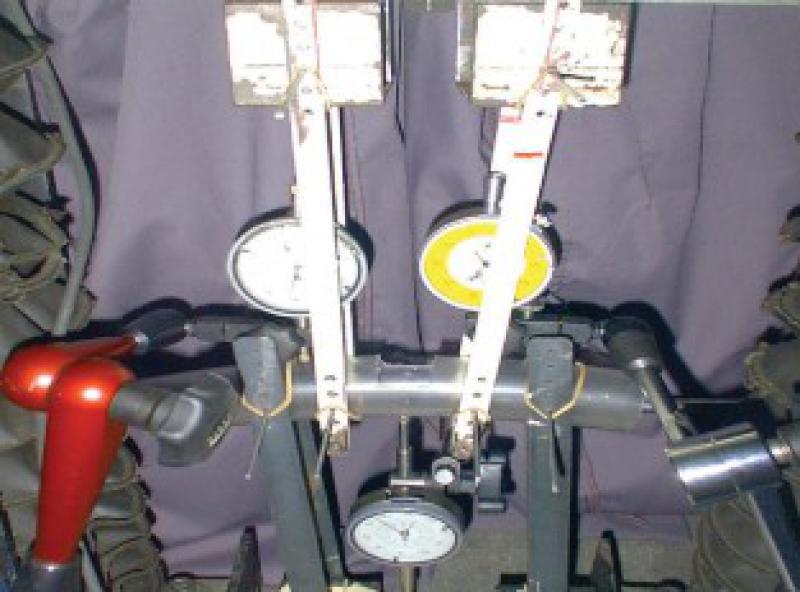
La máquina universal de ensayos de marca Instron (Figura 1) es un dispositivo que permite la aplicación de cargas y desplazamientos controlando todas las posibles variables de ensayo. Esta máquina permite la aplicación de esfuerzos a velocidad de desplazamiento o deformación constante, teniendo una capacidad de hasta 5000 Kg y una velocidad máxima de deformación de 50 mm/min. La máquina consta de un marco rígido y un dispositivo de control que hace desplazar verticalmente un carro sobre dicho marco logrando impartir físicamente una carga de tracción o compresión de forma directa. A este dispositivo de ensayo se le pueden anexar distintos accesorios estándares o hechos a medida para generar distintos estados de carga. Es decir, se le pueden adosar accesorios para, por ejemplo, generar flexión en 3 o 4 puntos, mordazas especiales para telas o polímeros, marcos de cargas combinadas, cámaras térmicas para ensayos con temperatura, etc... El dispositivo de ensayos se encuentra en una sala que posee ambiente controlado en humedad y temperatura, siendo en general estos parámetros fijados en 23ºC y 50 % de HR. La máquina de ensayos consta de distintos sensores para medir las variables de ensayo (fuerza, desplazamiento, deformación, etc.). Estos sensores pueden medir cargas en distintos rangos que van de los 20 N hasta los 50000 N y desplazamientos del orden de las centésimas de milímetro. Todos estos sensores se conectan a una computadora con un sistema de adquisición de Nacional Instruments (NI) que permite digitalizar los datos de ensayo para ser posteriormente procesados.
La validez del modelo experimental sin la estabilización que ofrece la musculatura y los planos faciales que la rodean o la presión intra-abdominal que ordinariamente importa en el mecanismo de absorción de cargas extrínsecas e intrínsecas en el animal vivo puede ser cuestionada. Pero esto es posible debido a que en el posoperatorio o en pacientes paralizados los parámetros mencionados se encuentran reducidos.
Previo al experimento 1 se realizó un estudio para validar y poner a punto una técnica y cuantificar la resistencia de la columna vertebral a movimientos de flexión y extensión.
Para cumplir este objetivo se buscó un material sintético con características similares a la columna vertebral a efectos de construir una columna vertebral artificial. Esta columna vertebral sintética se construyó con un tubo de PVC de 5 cm de diámetro externo y 25 cm de largo. En la parte superior de la misma se realizó un corte horizontal de 3 cm de largo por 2 cm de ancho, emulando una laminectomía Funkquist A (Figura 2).

Una vez preparada, la cadena cinemática fue sujetada a la máquina de medición a través de 4 varillas con perforaciones que se correspondían con los clavos.
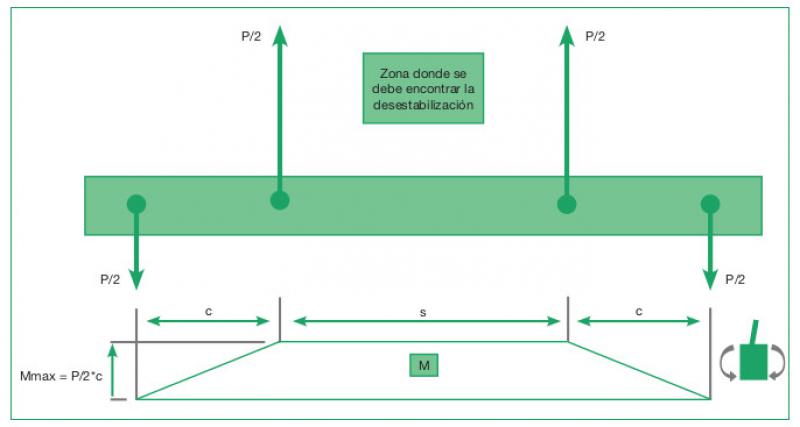
Debido a la dificultad de poder localizar los puntos de sujeción (clavos) sobre la columna vertebral siempre en la misma posición, es decir, siempre separados a la misma longitud, se optó por utilizar una configuración de ensayo de flexión en 4 puntos. Esta opción es la mejor en esta situación ya que permite asegurar que el momento flector sobre la zona en estudio (vértebras desestabilizadas) sea constante (Figura 3).
Determinaciones experimentales
Experimento 1

Se trabajó con cinco (5) cadenas cinemáticas sin daño inducido, las que fueron retiradas de la cámara de frío el día previo al procedimiento de medición. Las cadenas cinemáticas de vértebras fueron fijadas al dispositivo de ensayo de utilizando la metodología descripta previamente y aproximada con el modelo experimental de PVC, es decir, colocando cuatro (4) clavos de 2 mm de diámetro y 20 cm de largo atravesando los cuerpos vertebrales de L1, L2 y L4 y L5 perpendicular al eje longitudinal y equidistantes uno de otro, para la realización de la flexión en cuatro puntos. Estos clavos fueron colocados con las técnicas quirúrgicas standard. Una de las cinco cadenas cinemáticas puede apreciarse en la figura 4.
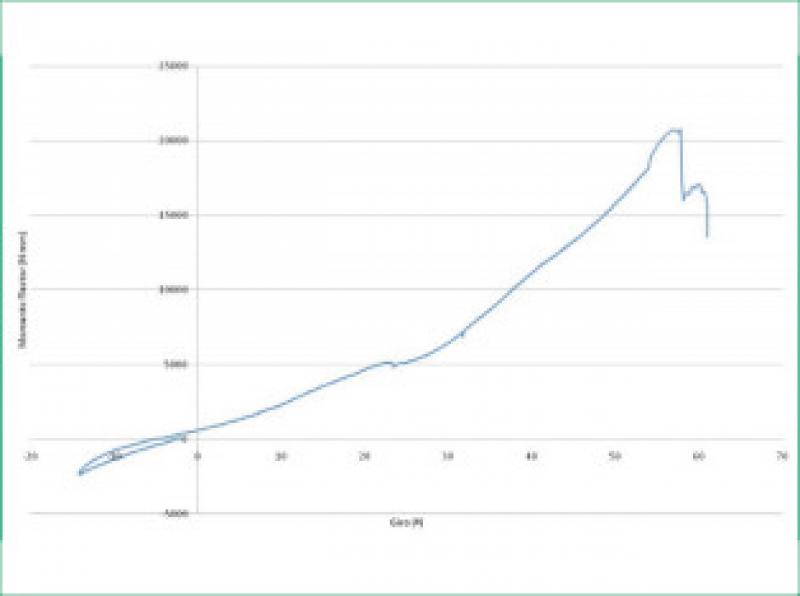
De esta manera el modelo experimental sin desestabilizar está listo para ser colocado en el dispositivo de ensayo preparado ‘ad hoc’ en la máquina de ensayos universal y aplicar de esta manera el esfuerzo de flexión y extensión manteniendo un momento flector constante sobre el cuerpo vertebral de L3 (ver figura 5). Se aplica una fuerza de aproximadamente unos 112.5 N y se releva el desplazamiento alcanzado en extensión, y luego se cambia el sentido de la fuerza para lograr la flexión hasta el llegar al punto de ruptura o colapso. La fuerza aplicada por la máquina de ensayos y la correspondiente deformación será registrada en un registro tipo x-y. A modo de ejemplo se muestra uno de estos gráficos en la Figura 6.

Como se mencionara previamente, se ensayaron cinco conjuntos. Se procede a analizar los resultados y cuando se encuentran valores que se apartan excesivamente de las medias estos se descartan, siempre y cuando no se altere el análisis estadístico de los resultados. Esto se considera válido ya que presupone que distintos factores pudieron afectar el resultado individual y no es un comportamiento sistemático.
Los resultados experimentales de estos modelos experimentales vertebrales sin desestabilizar (normales) se presentan en la Tabla 1. En la primera parte se puede ver el valor de momento flector máximo (Mmax) en N/mm para cada conjunto vertebral, el valor de rigidez a flexión (F/y) en N/mm y los valores de momento flector para 10º de deformación en extensión y en flexión del conjunto vertebral. También se presentan los valores medios y su desviación.
| Tabla 1. Resumen de resultados para el experimento 1 (representados en fuerza vertical y desplazamiento de apoyos). |
| Columnasnormales | |||||||
| Parámetro | 1 | 2 | 3 | 4 | 5 | Valor medio | Desviación |
| Fmax (N) | 1175.4 | 1891.8 | 1660.8 | -- | 1998.3 | 1681.6 | 365.7 |
| Mmax (Nmm) | 17042.8 | 28376.5 | 22421.3 | -- | 25478.3 | 23329.7 | 4845.5 |
| F/y (N/mm) | 31.9 | 36.6 | 31.5 | -- | 28.8 | 32.2 | 3.2 |
| Mmax a -10° (Nmm) | -1334.6 | -2172.2 | -2836.9 | -- | -1802.4 | -2036.5 | 634.2 |
| Mmax a +10° (Nmm) | 2314.4 | 1835.1 | 1710.8 | -- | 2520.0 | 2095.1 | 384.7 |
Experimento 2
Se trabajó con 5 cadenas cinemáticas nuevas pero en este caso con un procedimiento de desestabilización inducido luego de retirarlas de la cámara de frío por 24 horas.
Al modelo experimental o cadena cinemática se le colocaron los clavos que lo sujetan al dispositivo de ensayos, con un taladro eléctrico previo a la técnica de desestabilización para evitar, así, cualquier potencial daño adicional relacionado con esta maniobra.
Una vez finalizada la colocación de los clavos, se procedió a desestabilizar la cadena cinemática. Para este fin se aplicó la técnica de laminectomía Funkiquist A. La elección de esta técnica descompresiva, actualmente en desuso, es debido a la gran inestabilidad que ella produce, consiste en retirar la apófisis espinosa, las apófisis articulares craneal y caudal, y los pedículos hasta la mitad de la estructura medular de la vértebra L3. Se eligió esta técnica debido a que su magnitud provocará una inestabilidad en la cadena cinemática evidente en los movimientos predeterminados.
La apófisis espinosa se retiró utilizando una gubia de Lempert y las apófisis articulares y pedículos mediante el fresado con taladro eléctrico (Dremel multipro®).
De forma similar a lo realizado en el experimento 1, se implementó una carga correspondiente a una flexión en 4 puntos: (a) flexión ventral del eje longitudinal con una carga del 10%, semejando una extensión de la columna vertebral canina y (b) flexión, hasta la ruptura o colapso de la columna vertebral. La implementación en la máquina de ensayos de este conjunto experimental se puede ver en la Figura 7.
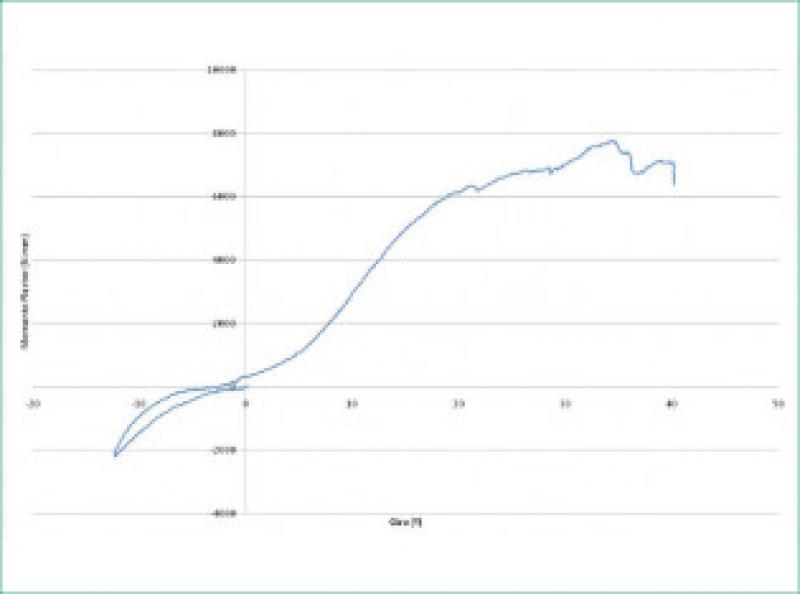
La fuerza aplicada por la máquina de ensayos y la correspondiente deformación será registrada en un registro tipo x-y. A modo de ejemplo se muestra uno de estos gráficos en la Figura 8. Los resultados experimentales de los conjuntos desestabilizados se presentan en la Tabla 2, conjuntamente con un gráfico típico de respuesta. Los datos tienen el mismo tratamiento que los presentados anteriormente a fin de su futura comparación.

| Tabla 2. Resumen de resultados para el experimento 2 (representados en fuerza vertical y desplazamiento de apoyos). |
| Columnas desestabilizadas | |||||||
| Parámetro | 1 | 2 | 3 | 4 | 5 | Valor medio | Desviación |
| Fmax (N) | 554.8 | 428.4 | 538.5 | 596.9 | -- | 529.7 | 71.8 |
| Mmax (Nmm) | 7767.1 | 7497.6 | 8885.7 | 8773.8 | -- | 8231.1 | 701.5 |
| F/y (N/mm) | 25.5 | 25.7 | 28.0 | 28.1 | -- | 26.8 | 1.4 |
| Mmax a -10° (Nmm) | -1439,0 | -2461,8 | -1452,2 | -1100,8 | -- | -1613,5 | 588,5 |
| Mmax a +10° (Nmm) | 3009,5 | 2485,3 | 2919,2 | 2304,7 | -- | 2679,7 | 338,9 |
Experimento 3
Se vuelve a realizar los mismos pasos para la utilización del modelo desestabilizado (experimento 2) pero en este experimento se instrumenta con el sistema de fijación espinal SCAM.
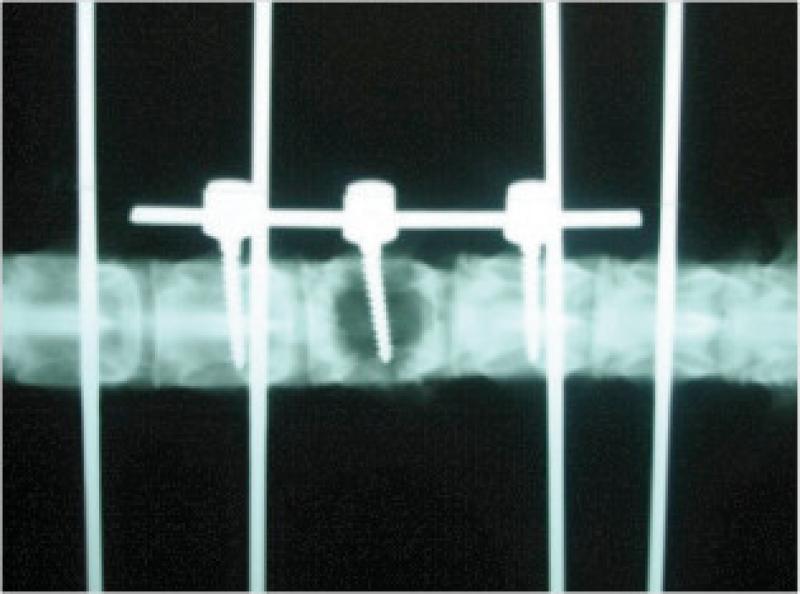
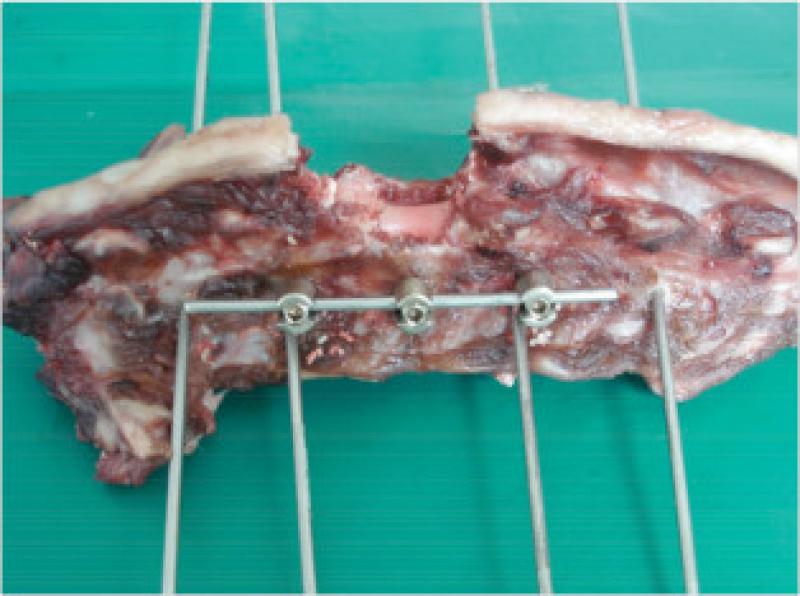
La colocación del sistema SCAM se inició marcando con una mecha de 2 mm, el punto de ingreso de los tornillos transpediculares en la base de las apófisis transversas de las vértebras L2, L3 y L4. Posteriormente, colocando un atornillador en la cabeza de los tornillos se forzó un ángulo de 35 grados respecto al eje longitudinal espinal. Los tornillos fueron atornillados a través del cuerpo vertebral hasta que la base de la cabeza tomó contacto con el mismo. Una vez fijados los tres tornillos, se colocó la barra conectora, uniéndolos para proceder a la colocación de las tuercas de bloqueo (una por cada tornillo) y por medio del atornillador o portador se procedió al ajuste. La correcta colocación de los implantes fue verificada a través de radiografías con incidencias ventro-dorsal (Figura 9). En la Figura 10 se puede observar un conjunto con la técnica SCAM de implementada.

Una vez verificada la colocación se procedió a cuantificar la resistencia de columnas estabilizadas de manera similar a la descrita en el experimento 1 y 2. El conjunto terminado previo a su instalación en el dispositivo de ensayo se puede ver en la Figura 11.
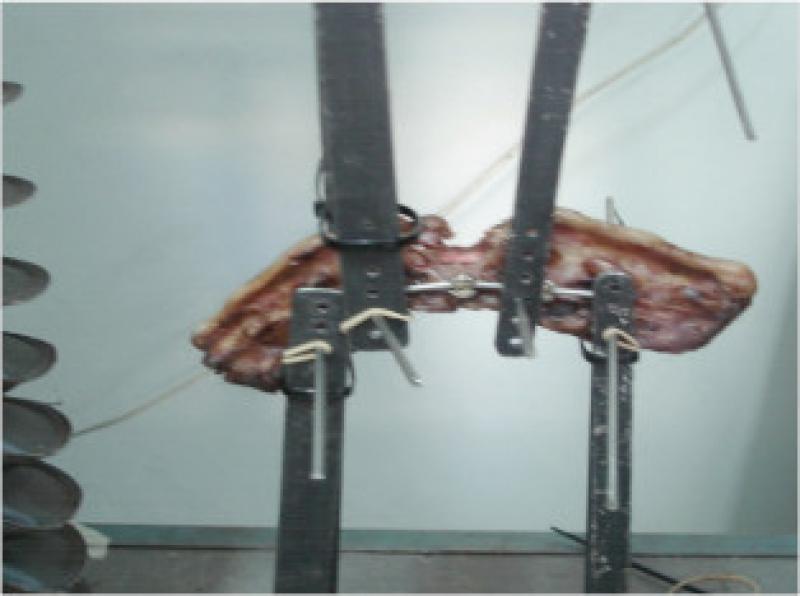
Colocado el sistema de fijación espinal SCAM al modelo experimental desestabilizado se realizan los mismos ensayos de carga y se relevan las mismas mediciones. Este conjunto, colocado en el dispositivo de ensayo, puede verse en la Figura 12. Posteriormente a realizar las mediciones en 10 grados en extensión de la cadena cinemática, se realiza la flexión hasta el colapso de la misma tal cual se puede ver en la Figura 13.
Los resultados experimentales de los conjuntos desestabilizados con el sistema de fijación SCAM se presentan en la Figura 14 conjuntamente con un gráfico típico de respuesta. Los datos tienen el mismo tratamiento que los presentados anteriormente a fin de su futura comparación.

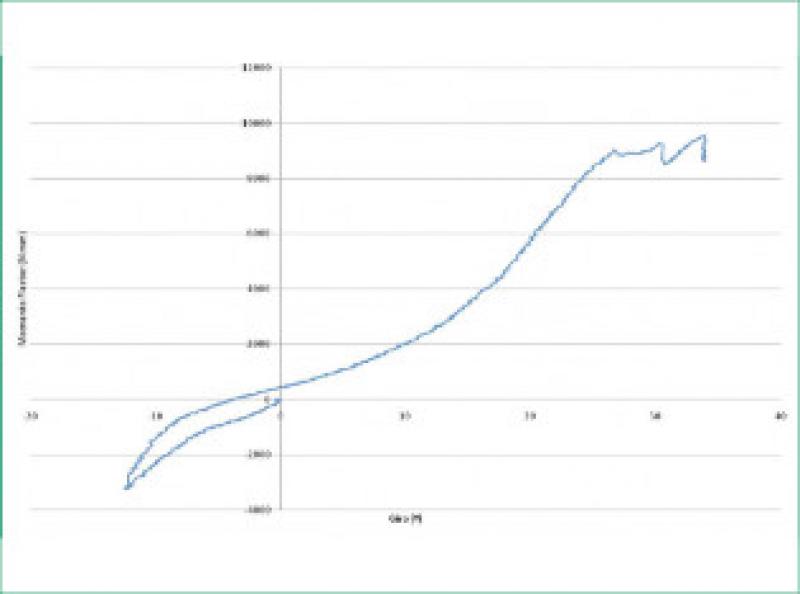
Los resultados experimentales de los conjuntos desestabilizados y estabilizados con el sistema SCAM, se presentan en la Tabla 3.
| Tabla 3. Resumen de resultados para el experimento 3 (representados en fuerza vertical y desplazamiento de apoyos). |
| Columnas desestabilizadas con SCAM implementado | |||||||
| Parámetro | 1 | 2 | 3 | 4 | 5 | Valor medio | Desviación |
| Fmax (N) | 794.2 | 727.1 | 744.3 | 981.6 | -- | 811.8 | 116.7 |
| Mmax (Nmm) | 9529.9 | 7452.9 | 10048.3 | 12760.5 | -- | 9947.9 | 2184.8 |
| F/y (N/mm) | 34.8 | 39.5 | 31.3 | 36.5 | -- | 35.5 | 3.4 |
| Mmax a -10° (Nmm) | -2280.5 | -1145.7 | -1831.2 | -1236.5 | -- | -1623.5 | 533.2 |
| Mmax a +10° (Nmm) | 2003.0 | 2699.4 | 2762.2 | 2708.0 | -- | 2543.2 | 361.2 |
Conclusiones
Como se puede apreciar en los resultados obtenidos de los trabajos realizados que las desviaciones de los valores medios obtenidos experimentalmente se encuentran dentro del 10% del valor medio por lo que este se puede asegurar la tendencia de los valores obtenidos en cada caso.
Las columnas normales del modelo experimental tienen una rigidez (F/y) de: 32.2 N/mm (± 3.2N/mm) y el modelo experimental desestabilizado por medio de la técnica de laminectomía dorsal Funkiquist A muestra una rigidez (F/y) de 26.8 N/mm (± 1.4 N/mm). Se puede apreciar que un conjunto vertebral desestabilizado presenta una reducción de su rigidez de aproximadamente un 20%.
En el movimiento de extensión hasta 10º pactado, no se observó alteración anatómica, pero sí en flexión. Cuando el modelo experimental colapsó, se pudo evidenciar afecciones en compartimiento dorsal de la columna vertebral, según clasificación de Denis. Las afecciones en las estructuras anatómicas observadas post-mediciones fueron las siguientes: luxación de apófisis articulares en vertebras L2-L3 con desgarro del ligamento inter-arcual en el mismo sitio, además de la ruptura fue en el ligamento inter-espinal L2-L3.
El sistema SCAM, no se vio afectado, ni dañado en ninguna de sus elementos que lo componen para este estudio.
La diferencia observada se pretende recuperar a partir de aplicar la técnica SCAM sobre la columna desestabilizada y así recuperar las características biomecánicas de la columna normal.
Los resultados obtenidos del modelo experimental instrumentado por el sistema de fijación SCAM, mostraron una rigidez (F/y) de 35.5 N/mm (± 3.4 N/mm).
El sistema evaluado tiene una eficacia aceptable de fijación para las diferentes configuraciones en fracturas vertebrales y permite recuperar prácticamente de forma total la biomecánica del conjunto vertebral devolviéndole una rigidez similar. La diferencia de rigidez entre la rigidez del sistema SCAM y del conjunto normal se encuentra dentro del error experimental.
Este sistema SCAM, además de ser colocado en forma rápida y sencilla, es compatible con otros métodos de fijación espinal, como así también con técnicas descompresivas, como hemilamenctomía, laminectomía, etc. Se deduce que este sistema puede ser utilizado en diferentes regiones vertebrales. Por el tipo de colapso observado en este estudio, el sistema SCAM sería una herramienta óptima en la instrumentación de patologías vertebrales inestables en los compartimientos ventral y medio de la clasificación de DENIS.
La configuración elegida y utilizada en este estudio es simple, ya que constó de tres tornillos y una barra de un solo lado, pudiendo colocar, si fuesen necesarios, más tornillos de un solo lado o misma cantidad de tornillos de ambos lados del eje longitudinal, dando una mayor resistencia al segmento espinal instrumentado.
Discusión
Creemos que estudios próximos con diferentes configuraciones de SCAM y comparación con otros sistemas de fijación espinal podrán reforzar las conclusiones anteriormente mencionadas, como también la utilización en casos in vivo21.
Este sistema tiene la posibilidad de brindarle al cirujano veterinario una herramienta para afrontar patologías complejas como por ejemplo: hemivértebras, vértebras butterfly, en región torácica, con una fácil colocación y un material noble como el titanio, sin requerir de sustancias agresivas y de complejidad séptica como lo es el sistema de clavos y metilmetacrilato. El bajo perfil de este sistema permite una óptima cobertura de la musculatura epiaxial, para un cierre adecuado. Otra de las ventajas en su utilización, es la instrumentación en diferentes regiones espinales, ampliando la utilidad de las placas de acero inoxidable colocadas con tornillos en cuerpo vertebral, cuya limitación es debido a impedimento de origen neurológico, de L3 hacia atrás y en vértebras torácicas por las costillas.
Tenemos la esperanza que el sistema de tornillos pediculares modificados (SCAM) sea en un futuro utilizado masivamente como lo es en la actualidad en medicina humana.
Bibliografía
- Kavit A. Hemilaminectomy in a dog with bone graft and metal internal fixation. Journal of the Amerrican Veterinary Medical Association. 1958; 132: 16-18.
- Harmon H, Hugenberg J E. Surgical reparaid of the vertebral fracture in a dog. Journal of the American Veterinary Medical Association 1966; 149:46-48.
- Hoerlein B F. Methods of spinal fusion and vertebral inmobilization in the dog. American Journal of veterinary Research.1956; 17:695-709.
- Archibald J, Pennock P.W, Cawley A J. Trauma of the vertebral column in dog. Veterinary medicine. 1959; 54:518-522.
- Yturraspe D.J, Lumb W.V. The use of plastic spinal plates for internal fixation of the canine spine.Journal of the American Veterinary Medical Association. 1972;161:1651-1657.
- Dulisch M.L, Withrow S.J. The use of plastic plates for fixation of spinal fractures in the dog. Canadian Veterinary Journal. 1979;20:326-332.
- Gage E.D. Surgical repair of spinal fractures in small breed dogs. Veterinary Medicine and Small Animal Clinician.1971;66:1095-1101.
- Gage E.D. A new method of spinal fixation in the dog. Veterinary Medicine and Small Animal Clinician. 1969;64:295-303.
- Swaim S.F. Vertebral body plating for spinal inmobilization. Journal of the American Veterinary Medical Association. 1971;158:1683-1695.
- Swaim S.F. Evaluation of four techniques of cervical spinal fixation in dogs. Journal of the American Veterinary Medical Assocition.1975;166:1080-1086.
- Rouse G.P, Miller J.I. The use of methylmetacrylate for spinal stabilization. Journal of the American Hosp.Association. 1975;11:418-425.
- Blass CE, Seim HB: Seim HB. Spinal fixation in dogs using Steinmann pins and methylmetacrylate. Vet surg. 1984; 13: 204.
- Wong W.T, Emms S.G. Use of pins and methylmethacrylate in stabilisation of spinal fractures and luxations. Journal of Small Animal Practice. 1992; 33: 415-422.
- Renegar W.R, Simpson S.T, Stoll S.G. The use of methylmetacrylate bone cement in cervical spine stabilization: a case report and dicussion. Journal of the America Animal Hospital Association. 1980;16:219-223.
- Roy-Camille R, Demeulenaere C. Osteosynthese du rachis dorsal, lombaire et lombo-sacre par plaque metalliques vissees dans les pedicules vertebraux et es apophyses articularies. Presse Med. 1970; 78:1447-1448.
- Garcia jnp, Milthorpe BK, Russell D. Biomechanical study of canine spinal fixation using pins or bone screws with polymethylmethacrylate. Vet. Surg. 1994; 23: 322.
- Flynn J, Rudert MJ, Olson E, Baratz M, Hanley E. The effects of freezing or freeze-drying on the biomechanical properties of the canine intervertebral disc. Spine 1990; 15(6): 567-70.
- Walter MC. Smith GK, Newton CD. Canine lumbar spinal internal fixation techniques: A comparative biomechanical study. Vet. Surg. 1986; 15: 191.
- Smith GK, Walter MC. Spinal decompresive procedures and dorsal compartment injuries: Comparative biomechanical study in canine cadavers. Am. J. Vet. Res. 1988; 49: 266-273.
- Shores A. Nichols C, Koelling HA. Combined Kirschner-Ehmer apparatus and dorsal spinal plate fixation technique of caudal lumbar vertebral fractures in dog: biomechanical properties. Am. J. Vet. Res. 1988; 49: 1979-1982.
- Leone f, E Durante. Nuevo sistema de fijacion espinal canino. Analecta Veterinaria, 2012; 32(2):24-32.